1. Tổng quan bài viết này
Đây là series thứ 3 về giới thiệu diffussion model , trong bài viết này mình sẽ hướng dẫn code về diffussion model . Chúng ta sẽ bắt đầu với bài báo DDPM(Denoising Diffusion Probabilistic Models) , trong bài viết này chúng ta sẽ dử dụng framework tensorflow . Trước khi bắt đầu bài viết chúng ta sẽ nhắc lại chút kiến thức từ Series 2 về mình sẽ cập nhật thêm một số kiến thức còn thiếu trong series 2 để chúng ta củng cố cho bài học này.
1.1 . Tóm tắt khuyến tán thuận(Forward process)
Hình 1: Hình vẽ biểu thị quy trình khuyến tán với mũi tên màu đen ám chỉ quy trình khuyến tán thuận và mũi tên màu xanh là quá trình khuyến tán ngược . Màu hồng ám chỉ rằng mũi tên màu xanh và màu hồng phải có cùng giá trị mà ta quan tâm.
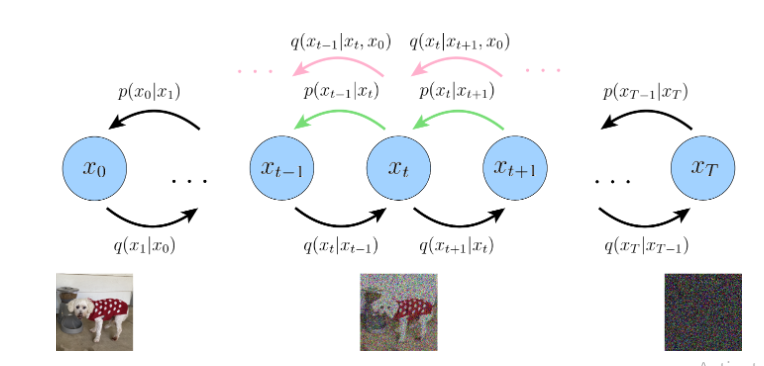
Đầu tiên chúng ta sẽ bắt đầu với khuyên tán thuận .Được miêu tả như sau:
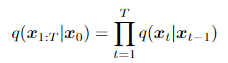
(1)
q(x1:T∣x0)=∏t=1Tq(xt∣xt+1)q ( x _ { 1 :T} | x _ { 0 } ) = prod _ { t = 1 } ^ { T} q ( x _ { t } | x _ { t + 1 } )
mà:
(2)‘
q(xt∣xt−1)=N(xt;αtxt−1,(1−αt)I=xt)q ( x _ { t } | x _ { t – 1 } ) = N ( x _ { t } ; sqrt { alpha _ { t } } x _ { t – 1 } , ( 1 – alpha _ { t } ) I = x_{t})
Khi đó ta có thể tính reparameter trick:
(3)
xt=α‾tx0+1−α‾tϵ0x_{t} = sqrt { overline { alpha } } _ { t} x _ { 0 } + sqrt { 1 – overline { alpha } } _ { t } epsilon _ { 0 }
Từ reparameter trick ta áp dụng quy tắc bayess từ series2 để tính trung bình của mọi ảnh noise tiếp theo dụa trên đầu vào ảnh x0x_{0}
(4)
μq(xt,x0)=αt(1−α‾t−1)xt+α‾t−1(1−αt)x01−α‾tmu _ { q} left ( x _ { t } , x _ { 0 } right ) = frac { sqrt { alpha _ { t } } left ( 1 – overline { alpha } _ { t – 1 } right ) x_ { t} + sqrt { overline { alpha } _ { t – 1 } } left ( 1 – alpha _ { t } right ) x_ { 0 } } { 1 – overline { alpha } _ { t} }
(5)
μθ(xt,t)=αt(1−α‾t−1)xt+α‾t−1(1−αt)x^θ(xt,t)1−αt‾mu _ { theta } ( x _ { t } , t ) = frac { sqrt { alpha _ { t } } ( 1 – overline { alpha } _ { t – 1 } ) x _ { t } + sqrt { overline { alpha } _ { t – 1 } } ( 1 – alpha _ { t } ) hat { x } _ { theta } ( x _ { t } , t ) } { 1 – overline { alpha _ { t } } }
1.2. Tóm tắt Khuyến tán ngược(Reverse process)
Như chúng ta đã biết từ phương trình số (33) trong series 2 thì hàm loss được viết như sau:
Hình 2: Mô tả hàm loss function từ series của mô hình diffussion model

Từ phương trình số (3) ta biết được rằng ta có thể tính toán reparameter trick của khuyến tán ngược lại đây được gọi là quá trình lấy mẫu . (Get sample) , trong DDPM bạn nên nhớ một điều rằng bảo toàn phương sai tức phương sai của mọi bước thời gian t với t=[1,t]{t = [1,t]} luôn không bao giờ thay đổi và chúng luôn bằng 1. Từ đó ta có thể tính toán ngược lại và hơn hết là Học parameter của trung bình μtmu_{t} . Đây sẽ là quá trình lấy mẫu để dự đoán ra ảnh từ tham số đã học được
(6)
x0=xt−1−αtϵ0α‾tx _ { 0 } = frac { x _ { t } – sqrt { 1 – alpha _ { t } } epsilon _ { 0 } } { sqrt { overline { alpha } _ { t } } }
(7) thay (6) vào phương trình (4)
μq(xt,x0)=αt(1−α‾t−1)xt+α‾t−1(1−αt)x01−α‾tmu _ { q } ( x _ { t } , x _ { 0 } ) = frac { sqrt { alpha _ { t } } ( 1 – overline { alpha } _ { t – 1 } ) x _ { t } + sqrt { overline { alpha } _ { t – 1 } } ( 1 – alpha _ { t } ) x _ { 0 } } { 1 – overline { alpha } _ { t } }
(8)
αt(1−α‾t−1)xt+α‾t−1(1−αt)xt−1−αtϵ0α‾t1−α‾tfrac { sqrt { alpha _ { t } } ( 1 – overline { alpha } _ { t – 1 } ) x _ { t } + sqrt { overline { alpha } _ { t – 1 } } ( 1 – alpha _ { t } ) frac { x _ { t } – sqrt { 1 – alpha _ { t } } epsilon _ { 0 } } { sqrt { overline { alpha } _ { t } } } } { 1 – overline { alpha } _ { t } }
(9)
αt(1−α‾t−1)xt+(1−αt)xt−1−αtϵ0α‾t1−α‾tfrac { sqrt { alpha _ { t } } ( 1 – overline { alpha } _ { t – 1 } ) x _ { t } + ( 1 – alpha _ { t } ) frac { x _ { t } – sqrt { 1 – alpha _ { t } } epsilon _ { 0 } } { sqrt { overline { alpha } _ { t } } } } { 1 – overline { alpha } _ { t } }
(10)
αt(1−α‾t−1)xt1−α‾t+(1−αt)xt(1−α‾t)αt−(1−αt)1−α‾tϵ0(1−α‾t)αtfrac { sqrt { alpha _ { t } } ( 1 – overline { alpha } _ { t – 1 } ) x _ { t } } { 1 – overline { alpha } _ { t } } + frac { ( 1 – alpha _ { t } ) x _ { t } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } – frac { ( 1 – alpha _ { t } ) sqrt { 1 – overline { alpha } _ { t } } epsilon _ { 0 } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } }
(11)
(αt(1−α‾t−1)1−α‾t+1−αt(1−α‾t)αt)xt−(1−αt)1−α‾t(1−α‾t)αtϵ0( frac { sqrt { alpha _ { t } } ( 1 – overline { alpha } _ { t – 1 } ) } { 1 – overline { alpha } _ { t } } + frac { 1 – alpha _ { t } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } ) x _ { t } – frac { ( 1 – alpha _ { t } ) sqrt { 1 – overline { alpha } _ { t } } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } epsilon _ { 0 }
(12)
(αt(1−α‾t−1)(1−α‾t)αt+1−αt(1−α‾t)αt)xt−1−αt1−α‾tαtϵ0( frac { alpha _ { t } ( 1 – overline { alpha } _ { t – 1 } ) } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } + frac { 1 – alpha _ { t } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } ) x _ { t } – frac { 1 – alpha _ { t } } { sqrt { 1 – overline { alpha } _ { t } } sqrt { alpha _ { t } } } epsilon _ { 0 }
(13)
αt−α‾t+1−αt(1−α‾t)αtxt−1−αt1−α‾tαtϵ0frac { alpha _ { t } – overline { alpha } _ { t } + 1 – alpha _ { t } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } x _ { t } – frac { 1 – alpha _ { t } } { sqrt { 1 – overline{ alpha } _ { t } } sqrt { alpha _ { t } } } epsilon _ { 0 }
(14)
1−α‾t(1−α‾t)αtxt−1−αt1−α‾tαtϵ0frac { 1 – overline { alpha } _ { t } } { ( 1 – overline { alpha } _ { t } ) sqrt { alpha _ { t } } } x _ { t } – frac { 1 – alpha _ { t } } { sqrt { 1 – overline { alpha } _ { t } } sqrt { alpha _ { t } } } epsilon _ { 0 }
(15)
1αtxt−1−αt1−α‾tαtϵ0frac { 1 } { sqrt { alpha _ { t } } } x _ { t } – frac { 1 – alpha _ { t } } { sqrt { 1 – overlinealpha _ { t } } sqrt { alpha _ { t } } } epsilon _ { 0 }
(16) Từ đó suy ra
μθ(xt,t)=1αtxt−1−αt1−α‾tαtϵ^θ(xt,t)mu _ { theta } ( x _ { t } , t ) = frac { 1 } { sqrt { alpha _ { t } } } x _ { t } – frac { 1 – alpha _ { t } } { sqrt { 1 – overlinealpha _ { t } } sqrt { alpha _ { t } } }hat { epsilon } _ { theta } ( x _ { t } , t )
1.3 Tóm tắt Hàm loss Function
Sau khi đã xong bước lấy mẫu chúng ta sẽ thực hiện tiếp bước rút gọn hàm loss từ series 2 và dựa trên hình 2:
logpθ(x0∣x1)log p_{ theta } ( x _ { 0 } | x _ { 1 } )
Trong hàm loss funtion của chúng ta , ta sẽ bỏ qua điều này . Vì chúng sẽ được thực hiện bên ngoài quá trình đào tạo và nằm trong quá trình lấy mẫu. Trong bài báo tắc giả đã tóm gọn hàm loss và bỏ qua chúng , nói ngắn gọn hơn việc tối ưu hóa hàm loss sẽ phụ thuộc vào khoảng cách phân kỳ giữa noise ảnh khuyến tán thuận và noise ảnh khuyến tán ngược . Chúng gần bằng 0 thì tất cả sẽ đáp ứng được nhu câu trên.
(17)
argminDKLθ(q(xt−1∣xt,x0)∥pθ(xt−1∣xt))underset { theta } { arg min D _ { K L } } ( q ( x _ { t – 1 } | x _ { t } , x _ { 0 } ) | p _ { theta } ( x _ { t – 1 } | x _ { t } ) )
(18)
=argminθ12σq2(t)[∥μθ−μq∥22]= underset { theta } { arg min } frac { 1 } { 2 sigma _ { q } ^ { 2 } ( t ) } [ | mu _ { theta } – mu _ { q } | _ { 2 } ^ { 2 } ]
Dựa trên (15) và (16) ta có:
(19)
=argminθ12σq2(t)[∥1αtxt−1−αt1−α‾tαtϵ^θ(xt,t)−1αtxt+1−αtαt1−α‾ϵ0∥2]= underset { theta } { arg min } frac { 1 } { 2 sigma _ { q } ^ { 2 } ( t ) } [| frac { 1 } { sqrt { alpha _ { t } } } x _ { t } – frac { 1 – alpha _ { t } } { sqrt { 1 – overline { alpha } _ { t } } {sqrt { alpha } _ { t }}} hat { epsilon } _ { theta } ( x _ { t } , t ) – frac { 1 } { sqrt { alpha _ { t } } } x _ { t } + frac { 1 – alpha _ { t } } { sqrt { alpha _ { t } } sqrt{1-overlinealpha}} epsilon _ { 0 }| ^{2} ]
(20)
=argminθ12σq2(t)[∥1−αt1−α˙tαtϵ0−1−αt1−α‾tαtϵ^θ(xt,t)∥22]= underset { theta } { arg min } frac { 1 } { 2 sigma _ { q } ^ { 2 } ( t ) } [| frac { 1 – alpha _ { t } } { sqrt { 1 – dot { alpha } _ { t } } sqrt { alpha _ { t } } } epsilon _ { 0 } – frac { 1 – alpha _ { t } } { sqrt { 1 – overline{ alpha } _ { t } } sqrt { alpha _ { t } } } hat { epsilon } _ { theta } ( x _ { t } , t ) | _ { 2 } ^ { 2 }]
(21)
=argminθ12σq2(t)(1−αt)2(1−α‾t)αt[∥ϵ0−ϵ^θ(xt,t)∥22]= underset { theta } { arg min } frac { 1 } { 2 sigma _ { q } ^ { 2 } ( t ) } frac { ( 1 – alpha _ { t } ) ^ { 2 } } { ( 1 – overline { alpha } _ { t } ) alpha _ { t } } [ | epsilon _ { 0 } – hat { epsilon } _ { theta } ( x _ { t } , t ) | _ { 2 } ^ { 2 } ]
Ở đây, ϵ^θ(xt,t){hatepsilon_{theta}(x_{t},t)} là một mạng nơron học cách dự đoán noise từ T với gausian tiêu chuẩn x. Do đó chúng ta biết rằng mạng nơ ron dự đoán ra ảnh gốc x0{x_{0}} giống như dự đoán noise , hơn nữa tác giả đã thử nghiệm nhận thấy rằng việc dự đoán noise sẽ mang lại hiểu quả tốt hơn . Đó là lý do tại sao trong phương trình số (33) ta bỏ qua logpθ(x0∣x1){log p_{ theta } ( x _ { 0 } | x _ { 1 } )}.
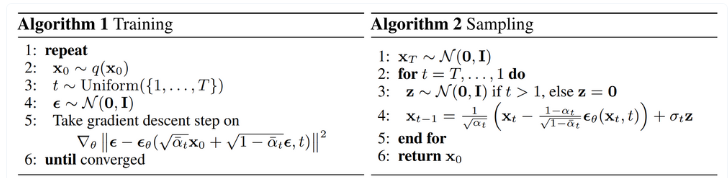
(22) Tổng kết gói gọn như trong paper

2. Thực Hành Code với DDPM
Ta sẽ thực hiện quá trình code diffussion model dựa trên 2 bảng tổng kết của DDPM đã ghi.
Hình *
2.1 Thực hiện với kiến trúc UNet
Tải thư viện về jupyternotebook hoặc trên colab
!pip install tensorflow_addons
Xây dựng Unet
import tensorflow as tf
import tensorflow_addons as tfa
import math
import tensorflow_datasets as tfds
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
class SelfAttention(tf.keras.layers.Layer):
def __init__(self, channels,**kwargs):
super(SelfAttention, self).__init__()
self.channels = channels
self.mha = tf.keras.layers.MultiHeadAttention(num_heads = 4,key_dim=self.channels)
self.ln = tf.keras.layers.LayerNormalization()
self.ff_self = tf.keras.Sequential([
tf.keras.layers.LayerNormalization(),
tf.keras.layers.Dense(channels),
tfa.layers.GELU(),
tf.keras.layers.Dense(channels)
]
)
def build(self,x):
self.reshape1 = tf.keras.layers.Reshape((x[1]*x[2],self.channels))
self.reshape2 = tf.keras.layers.Reshape((x[1],x[2],self.channels))
def call(self, x):
x = self.reshape1(x)
x_ln = self.ln(x)
attention_value = self.mha(x_ln, x_ln, x_ln)
attention_value = attention_value + x
attention_value = self.ff_self(attention_value) + attention_value
return self.reshape2(attention_value)
class DoubleConv(tf.keras.layers.Layer):
def __init__(self, out_channels, mid_channels=None, residual=False):
super(DoubleConv,self).__init__()
self.residual = residual
if not mid_channels:
mid_channels = out_channels
self.double_conv = tf.keras.Sequential([
tf.keras.layers.Conv2D(mid_channels, kernel_size=3, padding='same', use_bias=False),
tfa.layers.GroupNormalization(1),
tfa.layers.GELU(),
tf.keras.layers.Conv2D(out_channels, kernel_size=3, padding='same', use_bias=False),
tfa.layers.GroupNormalization(1)
]
)
self.gelu = tfa.layers.GELU()
def call(self, x):
if self.residual:
return self.gelu(x + self.double_conv(x))
else:
return self.double_conv(x)
class SILU(tf.keras.layers.Layer):
def __init__(self,**kwargs):
super(SILU,self).__init__()
self.sigmoid = tf.keras.layers.Activation("sigmoid")
def call(self,x):
theta = 1.0
return x* self.sigmoid(theta*x)
class Down(tf.keras.layers.Layer):
def __init__(self, in_channels, out_channels):
super(Down,self).__init__()
self.maxpool_conv = tf.keras.Sequential(
[
tf.keras.layers.MaxPool2D(pool_size=(2,2)),
DoubleConv(in_channels,residual=True),
DoubleConv(out_channels)
]
)
self.emb_layer = tf.keras.Sequential([
SILU(),
tf.keras.layers.Dense(out_channels)]
)
def repeat(self,t,x):
t = t[:,None,None,:]
t = tf.repeat(t,[x.shape[1]],axis=1)
t = tf.repeat(t,[x.shape[2]],axis=2)
return t
def call(self, x, t):
x = self.maxpool_conv(x)
t = self.emb_layer(t)
emb = self.repeat(t,x)
return x + emb
class Up(tf.keras.layers.Layer):
def __init__(self, in_channels, out_channels):
super(Up,self).__init__()
self.up = tf.keras.layers.UpSampling2D(size=2,interpolation="bilinear")
self.conv = tf.keras.Sequential(
[
DoubleConv(in_channels,residual=True),
DoubleConv(out_channels,in_channels//2)
]
)
self.emb_layer = tf.keras.Sequential([
SILU(),
tf.keras.layers.Dense(out_channels)
]
)
self.concat = tf.keras.layers.Concatenate(axis=-1)
def repeat(self,t,x):
t = t[:,None,None,:]
t = tf.repeat(t,[x.shape[1]],axis=1)
t = tf.repeat(t,[x.shape[2]],axis=2)
return t
def call(self, x, skip_x,t):
x = self.up(x)
x = self.concat([skip_x,x])
x = self.conv(x)
t = self.emb_layer(t)
emb = self.repeat(t,x)
return x + emb
class Encoding(tf.keras.layers.Layer):
def __init__(self,**kwargs):
super(Encoding,self).__init__()
def call(self,t,channels):
inv_freq = 1.0 / (10000 ** (np.arange(start=0, stop = channels, step=2)/ channels))
t = tf.cast(t[...,tf.newaxis],dtype=tf.double)
pos_enc_a = tf.math.sin(inv_freq * tf.repeat(t,repeats=[channels//2],axis=-1))
pos_enc_b = tf.math.cos(inv_freq * tf.repeat(t,repeats=[channels//2],axis=-1))
pos_enc = tf.concat([pos_enc_a, pos_enc_b], axis=-1)
return pos_enc
class UNet(tf.keras.Model):
def __init__(self, c_in=1, c_out=1, time_dim=256,**kwargs):
super(UNet,self).__init__()
self.time_dim = time_dim
self.inc = DoubleConv(64)
self.down1 = Down(64, 128)
self.sa1 = SelfAttention(128)
self.down2 = Down(128, 256)
self.sa2 = SelfAttention(256)
self.down3 = Down(256, 256)
self.bot1 = DoubleConv(512)
self.bot2 = tf.keras.layers.MultiHeadAttention(num_heads = 4,key_dim=512)
self.bot3 = DoubleConv(256)
self.up1 = Up(512, 128)
self.sa3 = SelfAttention(128)
self.up2 = Up(256, 64)
self.sa4 = SelfAttention(64)
self.up3 = Up(128, 64)
self.outc = tf.keras.layers.Conv2D(c_out, kernel_size=1)
self.pos_encoding = Encoding()
def call(self, x, t):
t = self.pos_encoding(t, self.time_dim)
x1 = self.inc(x)
x2 = self.down1(x1, t)
x2 = self.sa1(x2)
x3 = self.down2(x2, t)
x3 = self.sa2(x3)
x4 = self.down3(x3, t)
x4 = self.bot1(x4)
x4 = self.bot2(x4,x4,x4)
x4 = self.bot3(x4)
x = self.up1(x4, x3, t)
x = self.sa3(x)
x = self.up2(x, x2, t)
x = self.sa4(x)
x = self.up3(x, x1, t)
output = self.outc(x)
return output
2.2 Hyparameter
Chúng ta tiếp theo sẽ là các Hyparameter.
Hình 3: Mô tả alpha_bar(Khuyến tán thuận)
Hình 4: Mô tả trung bình tổng thể sqrt_alpha_bar
![]()
Hình 5: Mô tả phương sai one_minus_sqrt_alpha_bar
![]()
# HYPARAMETER
# data
num_epochs = 50 # train for at least 50 epochs for good results
image_size = 32
# optimization
batch_size = 256
learning_rate = 1e-3
weight_decay = 1e-4
# model
timesteps = 500 # Số bước thời gian T bạn có thể đặt tùy ý như DDPM trong bài báo là 1000 nhưng đây minh đặt theo cảm hứng
a_min = 0.0001 #
a_max = 0.02 #
# create a fixed beta schedule
beta = np.linspace(a_min,a_max, timesteps+1) lịch trình phương sai như trong series 2
# this will be used as discussed in the reparameterization trick
alpha = 1 - beta # Đặt alpha = 1-beta
alpha_bar = np.cumprod(alpha, 0) # Tính toán tích tất cả các alpha
alpha_bar = np.concatenate((np.array([1.]), alpha_bar[:-1]), axis=0) #a_0 = 1
sqrt_alpha_bar = np.sqrt(alpha_bar)
one_minus_sqrt_alpha_bar = np.sqrt(1-alpha_bar)
(x_train, y_train), (x_test, y_test) = tf.keras.datasets.fashion_mnist.load_data()
2.3 Data Sequence tensorflow
Tiền xử lý data bạn có thể tự do tùy chỉnh data tự do. Trong bài viết này mình đã test thử fashion_mnist.
class DataGenerator(tf.keras.utils.Sequence):
def __init__(self,img_paths,image_size,batch_size,dim=(28,28),n_channels=1,shuffle=True):
self.dim = dim
self.batch_size = batch_size
self.image_size = [image_size,image_size]
self.img_paths = img_paths
self.n_channels = n_channels
self.shuffle = shuffle
self.img_indexes = np.arange(len(self.img_paths))
self.on_epoch_end()
def __len__(self):
'Denotes the number of batches per epoch'
return int(np.floor(len(self.img_indexes) / self.batch_size))
def __getitem__(self, index):
'Generate one batch of data'
# Generate indexes of the batch
indexes = self.indexes[index*self.batch_size:(index+1)*self.batch_size]
# Find list of IDs
list_IDs_temps = [self.img_indexes[k] for k in indexes]
# Generate data
X = self.__data_generation(list_IDs_temps)
return X
def on_epoch_end(self):
'Updates indexes after each epoch'
self.indexes = np.arange(len(self.img_paths))
if self.shuffle == True:
np.random.shuffle(self.indexes)
def __data_generation(self, list_IDs_temps):
X = np.empty((self.batch_size, *self.dim))
for i, ID in enumerate(list_IDs_temps):
X[i,] = self.img_paths[ID]
X = X[:,:,:, np.newaxis]
X = tf.image.resize(X,size = self.image_size)
X = tf.cast(X/255.0,dtype=tf.float32)
return X
2.4 Khuyến tán thuận và Repameter trick
Tiếp theo là phần cực kỳ quan trọng đó chình là quá trình khuyến tán thuận của mô hình reparameter trick
Hình 6: Mô tả reparameter trick
![]()
![]()
class Forward_Noise(tf.keras.layers.Layer):
def __init__(self,sqrt_alpha_bar,one_minus_sqrt_alpha_bar,**kwargs):
super(Forward_Noise,self).__init__(**kwargs)
self.sqrt_alpha_bar = sqrt_alpha_bar
self.one_minus_sqrt_alpha_bar = one_minus_sqrt_alpha_bar
def forward_noise(self,x_0,t):
noise = tf.random.normal(x_0.shape)
reshaped_sqrt_alpha_bar_t = tf.cast(tf.experimental.numpy.reshape(tf.experimental.numpy.take(self.sqrt_alpha_bar, t), (-1, 1, 1, 1)),tf.float32) # trung bình tổng thể
reshaped_one_minus_sqrt_alpha_bar_t = tf.cast(tf.experimental.numpy.reshape(tf.experimental.numpy.take(self.one_minus_sqrt_alpha_bar, t), (-1, 1, 1, 1)),tf.float32) # phương sai
noisy_image = reshaped_sqrt_alpha_bar_t * x_0 + reshaped_one_minus_sqrt_alpha_bar_t * noise # Reparameter trick
return noisy_image,noise
def call(self,x_0,t):
noise_img,noise = self.forward_noise(x_0,t)
return noise_img,noise
class Generator(tf.keras.layers.Layer):
def __init__(self,timesteps,**kwargs):
super(Generator,self).__init__()
self.timesteps = timesteps
def generate_timestamp(self,num):
return tf.random.uniform(shape=[num], minval=0, maxval=self.timesteps, dtype=tf.int32)
def call(self,x):
x = self.generate_timestamp(x)
return x
Hiển thị thông tin khuyến tán thuận khi noise ảnh dần với gaussian.
forward_noise = Forward_Noise(sqrt_alpha_bar,one_minus_sqrt_alpha_bar)
generate_timestamp = Generator(timesteps)
train_generator = DataGenerator(x_train, image_size = image_size,batch_size =batch_size,shuffle=True)
val_generator = DataGenerator(x_test,image_size = image_size,batch_size=batch_size,shuffle=True)
# Let us visualize the output image at a few timestamps
sample_mnist = train_generator.__getitem__(1)[0]
fig = plt.figure(figsize=(32,50))
for index, i in enumerate([0,50,100,150,200,250,300,350,400,450,500]):
noisy_im, noise = forward_noise(sample_mnist, np.array([i,]))
plt.subplot(1, 11, index+1)
plt.imshow(np.squeeze(noisy_im))
plt.show()
Hiinh 7: Quá trình khuyến tán thuân bạn sẽ nhận thấy rằng DDPM có một nhược điểm mà sau này DDIM đã khắc phục được chúng.

2.5 Train Model
Chekpoint model
# create our checkopint manager
ckpt = tf.train.Checkpoint(net=net)
ckpt_manager = tf.train.CheckpointManager(ckpt, "./checkpoints", max_to_keep=2)
# load from a previous checkpoint if it exists, else initialize the model from scratch
if ckpt_manager.latest_checkpoint:
ckpt.restore(ckpt_manager.latest_checkpoint)
start_interation = int(ckpt_manager.latest_checkpoint.split("-")[-1])
print("Restored from {}".format(ckpt_manager.latest_checkpoint))
else:
print("Initializing from scratch.")
loss_fn = tf.keras.losses.MeanSquaredError()
# Prepare the metrics.
train_acc_metric = tf.keras.metrics.MeanSquaredError('mse train')
val_acc_metric = tf.keras.metrics.MeanSquaredError('mse val')
# Optimizers
opt = tfa.optimizers.AdamW(
learning_rate=learning_rate, weight_decay=weight_decay)
Train model.
@tf.function
def train_step(batch):
timestep_values = generate_timestamp(batch.shape[0])
noised_image, noise = forward_noise(batch, timestep_values)
with tf.GradientTape() as tape:
prediction = net(noised_image, timestep_values)
loss_value = loss_fn(noise, prediction)
gradients = tape.gradient(loss_value, net.trainable_variables)
opt.apply_gradients(zip(gradients, net.trainable_variables))
train_acc_metric.update_state(noise,prediction)
return loss_value
@tf.function
def test_step(batch):
timestep_values = generate_timestamp(batch.shape[0])
noised_image, noise = forward_noise(batch, timestep_values)
prediction = net(noised_image, timestep_values)
loss_value = loss_fn(noise, prediction)
# Update training metric.
val_acc_metric.update_state(noise,prediction)
return loss_value
from tqdm.notebook import trange
import time
for e in trange(num_epochs):
print("nStart of epoch %d" % (e,))
start_time = time.time()
# this is cool utility in Tensorflow that will create a nice looking progress bar
for i, batch in enumerate(iter(train_generator)):
# run the training loop
loss = train_step(batch)
# Display metrics at the end of each epoch.
train_acc = train_acc_metric.result()
print("Training MSE: %.4f" % (float(train_acc),))
# Reset training metrics at the end of each epoch
train_acc_metric.reset_states()
for i, batch in enumerate(iter(val_generator)):
# run the training loop
val_loss = test_step(batch)
val_acc = val_acc_metric.result()
val_acc_metric.reset_states()
print("Validation MSE: %.4f" % (float(val_acc),))
# print("validation KID: %.4f" % (float(val_kid),))
print("Time taken: %.2fs" % (time.time() - start_time))
ckpt_manager.save(checkpoint_number=e)
2.6 Get sample (khuyến tán ngược)
Quá trình lấy mẫu như trong bảng thứ hai của hình * và dựa trên phương trình(16):

def ddpm(x_t, pred_noise, t):
alpha_t = np.take(alpha, t)
alpha_t_bar = np.take(alpha_bar, t)
eps_coef = (1 - alpha_t) / (1 - alpha_t_bar) ** .5
mean = (1 / (alpha_t ** .5)) * (x_t - eps_coef * pred_noise)
var = np.take(beta, t)
z = np.random.normal(size=x_t.shape)
return mean + (var ** .5) * z
2.7 Hiển thị thông tin quá trình khuyến tán
from PIL import Image
def save_gif(img_list, path="", interval=500):
# Transform images from [-1,1] to [0, 255]
imgs = []
for im in img_list:
im = np.array(im)
im = (im + 1) * 127.5
im = np.clip(im, 0, 255).astype(np.int32)
im = Image.fromarray(im)
imgs.append(im)
imgs = iter(imgs)
# Extract first image from iterator
img = next(imgs)
# Append the other images and save as GIF
img.save(fp=path, format='GIF', append_images=imgs,
save_all=True, duration=interval, loop=0)
from tqdm import tqdm
x = tf.random.normal((1,32,32,1))
img_list = []
img_list.append(np.squeeze(np.squeeze(x, 0),-1))
for i in tqdm(range(timesteps)):
t = np.expand_dims(np.array(timesteps-i, np.int32), 0)
pred_noise = net(x, t)
x = ddpm(x, pred_noise, t)
img_list.append(np.squeeze(np.squeeze(x, 0),-1))
if i % 25==0:
img = np.squeeze(x[0])
plt.imshow(np.array(np.clip((img + 1) * 127.5, 0, 255), np.uint8))
plt.show()
save_gif(img_list + ([img_list[-1]] * 100), "ddpm.gif", interval=20)
plt.imshow(np.array(np.clip(img,a_min=0, a_max=255)))
plt.show()
Ảnh của mình sau khi generator.
![]()
3. Tổng Kết
Vậy là kết thúc phần series thứ 3 , nếu có bất cứ thắc mắc vui lòng đặt comment bên phía dưới mình sẽ giải đáp . Tuy nhiện DDPM có rất nhiều yếu điểm diffussion model có rất nhiều các giải pháp đã khắc phục nhược điểm đó nhưng hãy để mọi thứ trong series sau.
Tham khảo.
https://medium.com/@vedantjumle/image-generation-with-diffusion-models-using-keras-and-tensorflow-9f60aae72ac
https://arxiv.org/abs/2006.11239
Cảm ơn tất cả mọi người đã theo dõi . Chúc mọi người vui vẻ 😅😅😅😅😅😅😅😅😅
Nguồn: viblo.asia